|
5 N$ z3 \- ?0 {: a' i; I. P+ {* @ 原文作者:Cecilia Laschi & Marcello Calisti 一个以鱼为原型的自供能机器人凭借其柔软的躯体和离散排布的电路,成功克服了世界上最深海沟底部的极端压力。该机器人今后或能用于勘探神秘的未知海域。浙江大学和之江实验室的李国瑞、李铁风等人(下称李国瑞等人)[1]在《自然》报告了一个勇闯未知海域的软体机器人。在作者的精彩演示中,他们的机器人可以在海洋的最深处——马里亚纳海沟作业。传统的水下装置使用金属材质的防水外壳来对抗深海的高压环境——为了适应更大的深度,这些外壳的厚度和尺寸也必须逐级递增。而李国瑞等人的机器人将单薄的电子元器件离散分布,并嵌入柔软的硅橡胶中,这一设计摆脱了对耐压外壳的需求。 9 T) O/ ?0 R J2 n
软体机器人领域主要以活体生物为原型,利用软体材料制作机器人,常使用硅橡胶这类聚合物,以及可高度变形的结构,如编织线和织物。在与人类交互方面,软体机器人本质上比传统的刚性机器人更安全,其柔韧性也是各种性能的加分项——比如在操纵物体时更灵巧,能进入狭小空间,能在崎岖表面爬行。鱿鱼和章鱼这类海洋生物是软体机器人研究的灵感来源之一[2],而软体机器人反过来也为机器人探索海洋提供了新途径。李国瑞等人的研究正是这方面的一个有力展示。
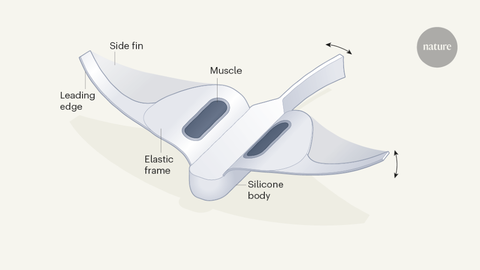
" h6 H+ W& Q; ?- G" }/ A4 x0 V 作者的机器人有着和鱼差不多的身体以及两个会扑动的侧鳍(图1)。作者采用了一种非常成熟的扑翼机制。这对鳍与机器人躯体的“肌肉”相连,使用了一种能将电能转化为机械功的柔性材料——当机器人电池发出的电流经过肌肉时,这些肌肉便会收缩。作者用微小的固体结构将收缩的肌肉与鳍进行机械连接,实现扑翼的动作。 $ V2 L& t7 S" Y; }' o; b
图1 | 深海机器人设计。李国瑞等人[1]开发了一种用柔性材料制作的机器人,该机器人可以承受深海下的极端压强。这个机器人外形类似鱼,有一个弹性框架,框架两侧有两个很薄的可扑动侧鳍;侧鳍的前缘使用了一种较硬的材质。框架上的“肌肉”由一种能将电能转换为机械功的材料制成,附着在两个鳍上(附着结构未显示)。当来自机器人电池的电流抵达肌肉时,这些肌肉会发生收缩。机器人的电子元器件和电池被嵌入中央的硅橡胶躯体内;它们在硅橡胶中离散排布,这样能保证它们在高压强下不会被破坏。 9 |- n1 Z g% S$ ~2 C7 r( ~
在这项研究中,李国瑞等人面临的一个挑战是如何让这个机器人的电子元器件能承受很高的压强。受到深海狮子鱼(Pseudoliparis swirei)头骨骨骼的启发,作者没有像传统电子装置那样,将所有电子元器件都集中在一起,而是将这些元器件分散排布。实验室测试和模拟显示,这种分布方式能减少元器件各接口在高压强下承受的压力。离散的元器件再被嵌入硅橡胶中,整合到机器人上。这种方式比其他保护深海装置元器件的方式更为实际,经济成本也更低。
w$ v; m2 G- m( ~/ h 李国瑞等人先在实验室测试了这个机器人的游泳能力。他们在一个加压的水箱中将机器人系在一个杆上,机器人会绕着这个杆游泳。随后,研究人员先在湖面下70米深处进行测试,这个机器人能以每秒3.16厘米的速度自由游动;之后研究人员挑战了中国南海海面下3200米的深度,机器人的最大游动速度为每秒5.19厘米(相当于0.45倍身长每秒),这与其他软体机器人的性能相当[3]。最后,研究人员在马里亚纳海沟中测试了这个机器人的扑翼和耐压能力,他们将机器人系在一个传统的水下机器人上,这个传统机器人还拍下了测试过程。
7 Q% P* v6 s, i* m: x 之前的很多研究都尝试开发水下软体机器人,水下机器人的一大挑战在于它很难和物体进行精确交互,这是因为机器人的传感器难以在水下正常运作。在采集和抓取脆弱的海洋生物以供海洋生物学家研究时,软体机器抓手[4]比刚性抓取装置多了不少优势。仿生软体机器鱼[5]还能在不打扰的情况下和其他动物一起游动,从而实现近距离研究。现在,李国瑞等人的研究推动了软体机器人的能力边界——他们将离散分布的电子元器件嵌入柔性材料,从而取代了刚性保护外壳,为新一代的深海探测器铺平了道路。
3 p& z' D2 a7 F+ k9 \- o 不过,在将这类机器人放入大海前,还有很多工作要做。李国瑞等人的机器人比之前报道的水下机器人[6]要慢,无法承受太大的扰动,比如,它很容易被水下的暗流卷走。它的运动能力也需要针对实际应用进行优化。不过,李国瑞等人的方法为坚实牢固的深海探测器奠定了基础。 & `- R( x; s' f v
放眼未来,我们或将看到软体机器人在珊瑚礁或水下洞穴中安全穿行,在不造成破坏的情况下采集脆弱的样本,为海洋生物学研究开辟新的领域。成群结队的水下软体机器人能够在海底爬行,锚定在各种结构上,或是游过特定的区域,这将促进其他应用场景的技术开发,包括海洋监测,海洋污染的清理和预防,或是海洋生物多样性的保护等。更重要的是,它们还能帮助研究人员深入有待探索的大片深海区域。
; Q3 V4 i& [6 z6 Y K4 L0 O+ B; k 参考文献:
" Z1 c5 ^" J% l 1. Li, G. et al. Nature 591, 66–71 (2021).
7 T" D- a4 l2 o; N* R 2. Nature 530, 24–26 (2016). . r8 t; A; w' X
3. Calisti, M., Picardi, G. & Laschi, C. J. R. Soc. Interface 14, 20170101 (2017).
; D$ \# @; a$ s2 Z6 U4 l 4. Sinatra, N. R. et al. Sci. Robot. 4, eaax5425 (2019).
9 t m$ A! d2 N; y: W. n 5. Katzschmann, R. K., DelPreto, J., MacCurdy, R. & Rus, D. Sci. Robot. 3, eaar3449 (2018).
) i. C7 e2 c" ]* f' q8 D 6. Roper, D. T., Sharma, S., Sutton, R. & Culverhouse, P. Proc. Inst. Mech. Eng. Part M 225, 77–96 (2011). 3 _2 @/ u# y; s4 M, \3 |1 C
原文以Soft robot reaches the deepest part of the ocean标题发表在 2021年3月3日的《自然》的新闻与观点版块上 ) G/ F( V9 n& S( _
© nature
- X. t" j+ F2 U2 t& K0 U- e doi: 10.1038/d41586-021-00489-y `! a/ X8 C0 M6 e0 a
" G$ q5 j* I! G! D# w 版权声明: ! t1 }, O; ]' h
本文由施普林格·自然上海办公室负责翻译。中文内容仅供参考,一切内容以英文原版为准。欢迎转发至朋友圈,如需转载,请邮件China@nature.com。未经授权的翻译是侵权行为,版权方将保留追究法律责任的权利。 ; V" a" [. P3 O) m3 |: C- [0 o
© 2021 Springer Nature Limited. All Rights Reserved
, I. R: }5 s3 E+ \9 i1 K" `/ ?0 M% ~% D) r+ T
7 q4 x1 u2 E0 n; S& r& y
! h# G0 d2 e1 K5 N) ^/ P; O/ o2 @. X4 p
|