|
3 E+ r6 t" B6 O6 ~! j 来源:溪流之海洋人生 4 |! {3 ]$ }9 x
作者:蔡荣捷
# a h% m0 C, @/ y5 Q; J 海洋,这一地球上最为辽阔且蕴含无尽奥秘的领域,长期以来一直是科学探索和技术革新的重要前沿。随着科技的不断进步,人类对深海资源的开发利用能力得到了显著提升,特别是在深海声学、隐身技术、动力系统、感知技术、生物拟态工程等关键领域,取得的进展令人瞩目。本文旨在全面审视这些领域的科技成就,并探讨它们如何协同作用,共同推动海洋科技的未来发展。
, c: j7 ~5 m1 i$ m 深海声学的研究不仅为我们提供了探测和理解深海环境的手段,而且在通信、导航及数据收集方面发挥着关键作用。海洋隐身技术的发展不仅对军事领域具有重要意义,而且为科学研究提供了新的可能性。此外,水下推进技术和感知技术的进步极大提高了我们在深海作业的能力和效率。最后,模仿海洋生物的机动性不仅是生物学和工程学交叉融合的产物,而且为我们设计高效、灵活的水下装备提供了新的灵感。
6 q5 X+ Q9 w4 T; | 综上所述,这些技术的发展不仅代表了科技进步,而且为深海探索和海洋资源的可持续利用提供了新的可能性。本文将详细探讨这些技术的发展及其在海洋探索中的应用,为读者展现一个多维度的海洋科技前景。 0 u% D; T( I) _% ~- Z
一、深海声学的突破
6 v3 t+ T- x; E. d2 T% p2 H 深海声学技术的发展是海洋科学领域的一大里程碑,它不仅推动了我们对海洋深处的理解,而且在多个方面实现了技术上的突破。深海声学的应用范围广泛,包括深海探测、海底地质研究、生物群落监测及海洋环境保护等。 5 m& P* W% K7 F) l- t- ~+ }( F y
⒈深海探测技术
( L- U6 q# W. M* a7 x! P8 ]) q 应用声学波进行深海探测在海洋科学领域已成为一项关键技术,特别是多波束声呐技术(多波束测深系统组成示意图如图1所示),该技术通过精细绘制海底地形图,为海底地质研究提供了极其重要的数据支撑。
3 d: B9 ~& |6 A 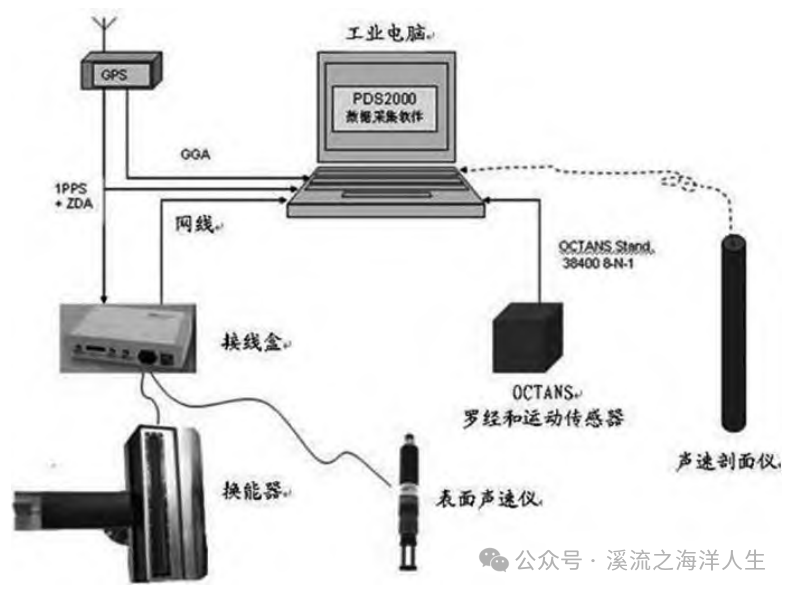
$ |+ S+ G# E: v1 r+ T: W, s 图1 多波束测深系统组成示意图 , Q4 }) Z& T3 M. e! K( r4 H& w3 b
⒉海底地质研究 / l! B S! h& w% J' |5 H1 g7 }4 }/ v
声学技术在海底沉积物和地层分析中发挥着重要作用。利用声波反射特性(声学系统作业示意图如图2所示),科学家们能够分析海底沉积层的厚度和构成,从而更好地理解地质历史。
9 i* l; y# m/ i6 c2 ?0 h, X 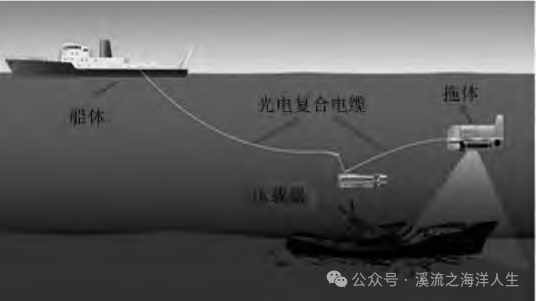
. n! r, t' `8 U7 P0 D4 O" f' K
图2 声学系统作业示意图
, [% a' P7 _7 a ⒊生物群落监测 / S5 f q3 i* O6 i) B% D: C

0 F! b, A- L3 K
综上所述,深海声学技术(深海声学系统模型如图4所示)的持续进步不仅增强了其功能性,扩大了其应用范围,而且为海洋科学研究领域带来了新的视角和方法论为海洋资源的保护和环境的可持续管理奠定了坚实的科学基础。
4 {) } ]( [0 W. p7 j( ? 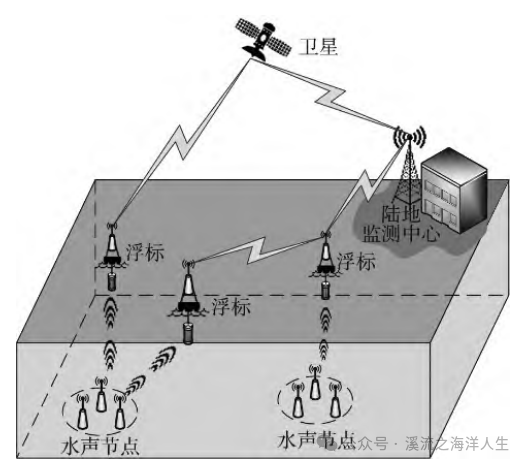
+ E: u* D! E% R: \& ?# _1 A 图4 深海声学系统模型
& P- s. ^, k( p1 R# N2 R) W 二、海洋隐身之道
! Z4 s( J% H L8 O+ J 海洋隐身技术是近年来海洋科技领域的一个重要突破,主要涉及对海洋环境中声学和光学隐身的研究。这些技术的发展对于军事防御、海洋探测、生态保护及科学研究具有重要意义。 ' n/ \% O3 _0 d2 e! j- k9 M/ A
⒈声学隐身技术
, h1 |, o5 L+ `2 Q/ o) [* d 声学隐身技术主要用于降低船只或核潜艇的声学可观测性,是现代舰艇不可或缺的一项重大技术。例如,美国海军的潜艇采用了先进的吸声材料和特殊的船体结构,有效地降低了潜艇在运行中发出的噪声。 + j) I4 P; d- S9 w( j
⒉光学隐身技术 : R' B8 Z' v, X- v+ K
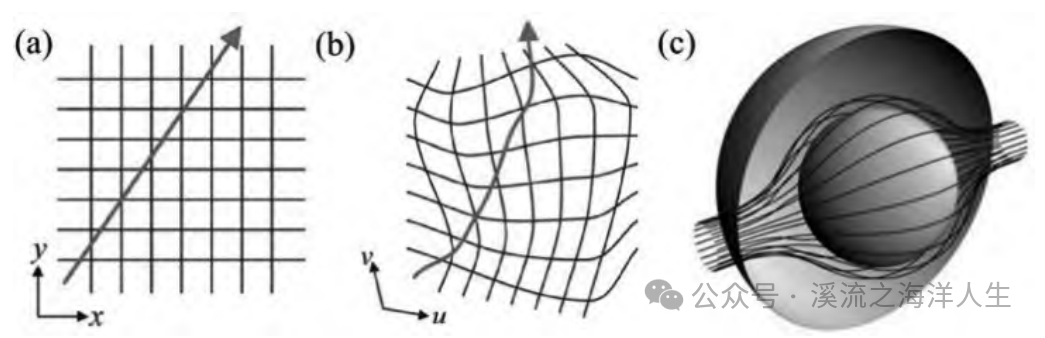
光学隐身技术的原理基于物体在光照条件下能实现隐形(基于变换光学隐身的原理图如图5所示)。智能伪装涂层可针对该探测方式,起到主动隐身的效果,是可见光波段隐身研究的重点方向。这种涂层可以根据光照变化颜色,用以实现海洋探测设备或小型潜艇伪装。 $ s/ L% U' t: y& u
# _1 I! u& E! r7 w O( |! E
图5 基于变换光学隐身的原理图
1 L" c6 R; Z- y3 q ⒊多功能隐身材料 7 R I* f3 k- T/ T& n0 R8 w
当前,海洋隐身技术正经历着革命性的发展,尤其是在开发具有多重功能性的材料方面。雷达隐身复合材料是将吸波剂分散在复合材料中,进而实现雷达隐身效果。这些创新性材料通过精巧的设计和复杂的材料组合,实现了对声波的吸收和对光波反射的动态调整。 0 L) j5 @- C2 H$ g: m P
综上所述,海洋隐身技术的发展不仅体现了人类对海洋环境探索能力的提升,而且体现了人类对海洋生态系统保护的深入思考。随着技术的不断进步,在未来,海洋隐身技术将在更多领域发挥其重要作用。
u0 e0 Q5 J) x5 H3 x 三、水下推进装置
) i" ]$ ?5 h: ?# Q 潜艇与水下无人航行器(UUV)在水中的高度机动性与自由度,得益于其搭载的精密水下推进系统。这些推进装置不仅显著提升了水下设备的操作效率与机动性,而且通过模拟海洋生物的游动方式,实现了装置在水下环境的低声学干扰运行。 5 V5 M! v) p4 E- b
⒈电磁推进系统
) s! ~$ I0 t0 s 在传统螺旋桨推进系统所带来的声学干扰问题中,现代潜艇与水下无人航行器(UUV)的研发转向了采用电磁推进系统。采用电磁推进的船舶,由于没有螺旋桨等运动部件,因而毫无振动的感觉,可在海上静静地航行。
# b0 b! V* y; I1 D ⒉水喷射推进技术
$ ^7 o& p( R9 e6 [2 ^# n( ` 水喷射推进是水下的喷气引擎,通过高速喷射水流产生推力。相比于螺旋推进,喷水推进在高速舰船(瑞典维斯比级巡逻舰如图6所示)等水中载运工具的推进效率、噪声等方面有着优越的性能。这种技术特别安静,适合快速移动的水下设备。一些特种UUV就依托这项技术,实现了在复杂的深海环境中灵活机动的目标。
8 H3 Q8 K1 ~7 [ H 
# b* q' v) ?& O, Y: M
图6 瑞典维斯比级巡逻舰 ; {$ S8 G- ]1 ]7 P3 R. x
⒊能源高效的推进技术 9 R, D7 d& t' Y
在当前对海洋环境保护重视程度日益提升的背景下,研发节能且对环境影响最小化的推进技术显得尤为关键。燃料电池是将燃料气输运至燃料电池内部,不经过燃烧直接转换为电能的发电装置,具有效率高(>45%)、环境友好、比能量高、噪声震动小等特点。一些新型UUV用上了太阳能板和燃料电池(甲醇重整制氢技术工作原理图如图7所示),提高了能源效率,减少了对环境的影响。
6 E% X- g! j/ `' K: C: E6 R 
- u! m: D# M7 F; G% W7 S: d 图7 甲醇重整制氢技术工作原理图 4 _( m x2 L% s% O
综上所述,水下推进装置的发展不仅体现了技术的创新和进步,而且为深海探索和海洋科学研究提供了更加高效、安静和环境友好的工具。
/ G; E9 Y) k' N5 m+ Q: B5 \ 四、水下感知技术
/ D9 [6 G. }5 v1 J; T- o 水下感知技术是海洋探索和研究的关键部分,其涉及声学、光学等多个方面。这些方面的感知技术使我们能够在深海环境中进行有效的探测、导航和环境监测。 0 t! i$ }7 _5 ^4 J
⒈声学感知技术
0 A: n- G) d0 Q! ^3 ]# N ⒉光学成像和传感器
4 j. j6 R4 I& _: z0 ~# R 随着技术的进步,高分辨率的水下摄像机(水下合成孔径成像实验装置如图8所示)和光学传感器成为水下感知领域的重要工具。它们能提供清晰的图像和数据,用于研究海洋的生物多样性和勘探海底地质。 1 J9 \; Z+ Y) C- |5 A

- ?2 X' G: n/ }8 r 图8 水下合成孔径成像实验装置
" X! `" h- Z; c/ k ⒊环境监测和生态研究
. q% E$ b. |% q3 ~# R5 W9 f: a; q 水下感知技术在海洋环境监测和生态研究中也发挥着重要作用。通过部署多种感知装置,可以长期监测海洋环境的变化,如水温、盐度、污染物水平的变化,对海洋生态系统的健康状况进行评估。全球海洋观测系统(GOOS)集成了观测卫星、浮标等多种传感器,并实现全球业务化运营,为海洋观测提供了重要数据。 ; [8 x H1 k1 Z }( x
综上所述,水下感知技术的发展不仅为深海探索提供了强有力的工具,而且为海洋环境的保护和科考工作提供了有力帮助。 ' o- ~) ]0 `. B5 n! |$ U
五、模仿海洋生物的机动性 ) w8 p1 k: m; w, N& z
模仿海洋生物的机动性是海洋工程和机器人设计领域的一个创新方向。这种设计理念被称为生物拟态工程,旨在从海洋生物的运动机制中汲取灵感,开发高效、灵活的水下移动设备。
! p# B5 M7 X- w; H ⒈仿生乌贼和章鱼机器人 0 P& A' N9 r* g/ `
乌贼和章鱼因其独特的推进方式和柔软身体而成为仿生机器人设计的灵感来源。乌贼依靠高推进力喷射和高效率鳍波动的复合推进方式来实现游动。例如,一些研究团队开发了模仿乌贼喷射推进方式的水下机器人。这些机器人通过快速填充和排出水体来实现高速移动。同时,仿章鱼机器人能利用其柔软的触手进行抓取和操作,适用于复杂和狭窄的水下环境。 2 L9 Y8 Q6 d: ?3 Q6 i
⒉仿生鲨鱼皮肤材料
1 x0 ^) m, x% R" K% R' K: P 鲨鱼皮肤的特殊微观结构,及其在水中低阻力的特性,为海洋工程和材料科学提供了显著的设计启示。科学家们根据鲨鱼皮肤表面的微纹理特征,开发出了仿生表面材料。这些仿生材料通过模拟鲨鱼皮肤的减阻特性,有效降低了水下设备与水流的摩擦,从而提高了速度和节能效果。
( ^- ]0 D; S2 R" O0 a; P 特别是在高速水下无人航行器(UUV)的设计中,应用这种仿鲨鱼皮肤材料的外壳已经实现了显著的性能提升(高速水下无人航行器仿真图如图9所示)。这种外壳材料不仅提高了UUV的运行速度,而且通过减少水流阻力,显著提高了能源效率,从而增强了整体的作业性能和耐久性。
! ?1 ?) F6 h: _/ K7 v 图9 高速水下无人航行器仿真图
6 `5 q7 K8 D' R1 B2 L, z: s! N/ w ⒊仿生海豚推进技术
- A* C7 _( Q, [1 P 海豚是一种鲸类水生哺乳动物,其以尾巴能够高效摆动和机动性优异而备受人们关注。海豚的身体后端在摆动时,会呈现出豚体波形状,可帮助海豚实现高效率的推进。现在,海豚的运动机制已被科学家应用于水下推进系统的设计(不同摆幅海豚样机速度图如图10所示)。 * Y* E1 @6 g; I( u7 E" K! k; h
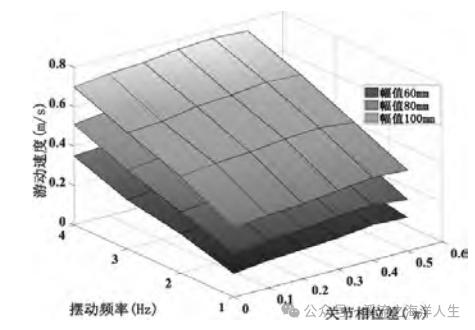
A! I% f7 e3 }8 D! {1 E 图10 不同摆幅海豚样机速度图
7 G7 a3 g% u* i2 X" ? 综上所述,这些创新技术通过模仿海洋生物的运动机制,不仅提高了水下设备的性能,而且为海洋探索和相关领域的研究提供了新的思路。未来,随着生物拟态设计理念的进一步发展,我们可以期待那些更高效、更环保、功能更强大的海洋探索工具的诞生。
: _8 X! a# l+ a5 n% B- [ 六、结束语
0 p) h. S2 x; S8 C" k8 e 本文综合探讨了海洋技术领域的研究进展,包括深海声学、海洋隐身技术、水下推进装置、水下感知技术,以及模仿海洋生物的机动性。这些突破不仅展示了科学和技术在理解和探索海洋深处方面的巨大进步,而且为未来海洋的探索和利用提供了新的可能性。
( J& o; C6 J1 n5 ~ 总体而言,这些技术的融合和互相促进为海洋科学研究、海洋资源的可持续开发及环境保护提供了前所未有的机遇。随着这些技术的不断成熟和应用,我们对海洋的认识和利用将会达到一个新的高度,为人类的可持续发展做出重要贡献。未来,我们期待海洋技术继续在更多领域实现更多突破,为探索未知的海洋深处提供更加强大的支持。返回搜狐,查看更多
) v4 P) {' b5 T0 w: {& ]; d
) [# [3 S+ \" {' U. P5 T5 {; \; a$ C3 C0 ~0 x: M) j5 q
7 Q: P, e; ^# C0 e8 N" `3 R- {& f7 Q: q' ]
| 

