|
6 _9 H, s6 E" X- F9 P& d: [
一、市场规模与增长趋势 - h0 t! ]+ Y9 n0 f2 s
1. 市场现状
3 j" a% q" t/ b5 G, |% g l' L' P 潍坊市作为山东省的重要沿海城市,拥有丰富的海洋资源和广阔的海洋经济发展空间。随着无人船技术的不断成熟和应用领域的拓展,潍坊市无人船市场,特别是在海洋研究领域,呈现出快速增长的态势。 ' S) |- }. r$ F1 V- R. G
无人船在海洋科研、海洋勘探、水质监测、生态健康监测等领域的应用已经十分广泛,为海洋研究提供了强有力的技术支持。 7 N+ i5 N0 y) Q2 C3 P- H* `
2. 增长趋势
) y; q0 U% O, A4 T/ d 根据市场研究机构的预测,无人船市场在未来几年将保持高速增长。这一增长趋势得益于技术进步、政策支持以及市场需求的不断增加。
5 U% I( c" r% X% u 特别是随着人工智能、大数据、云计算等技术的快速发展和应用,无人船在海洋研究领域的智能化水平将进一步提升,从而推动市场规模的进一步扩大。
/ Z2 q, }- t% g6 z d. a) s 二、应用领域分析 8 l1 o0 ^. n! n' W H2 r7 i
1、海洋环境观测: 8 F" _7 W- Z' R: {
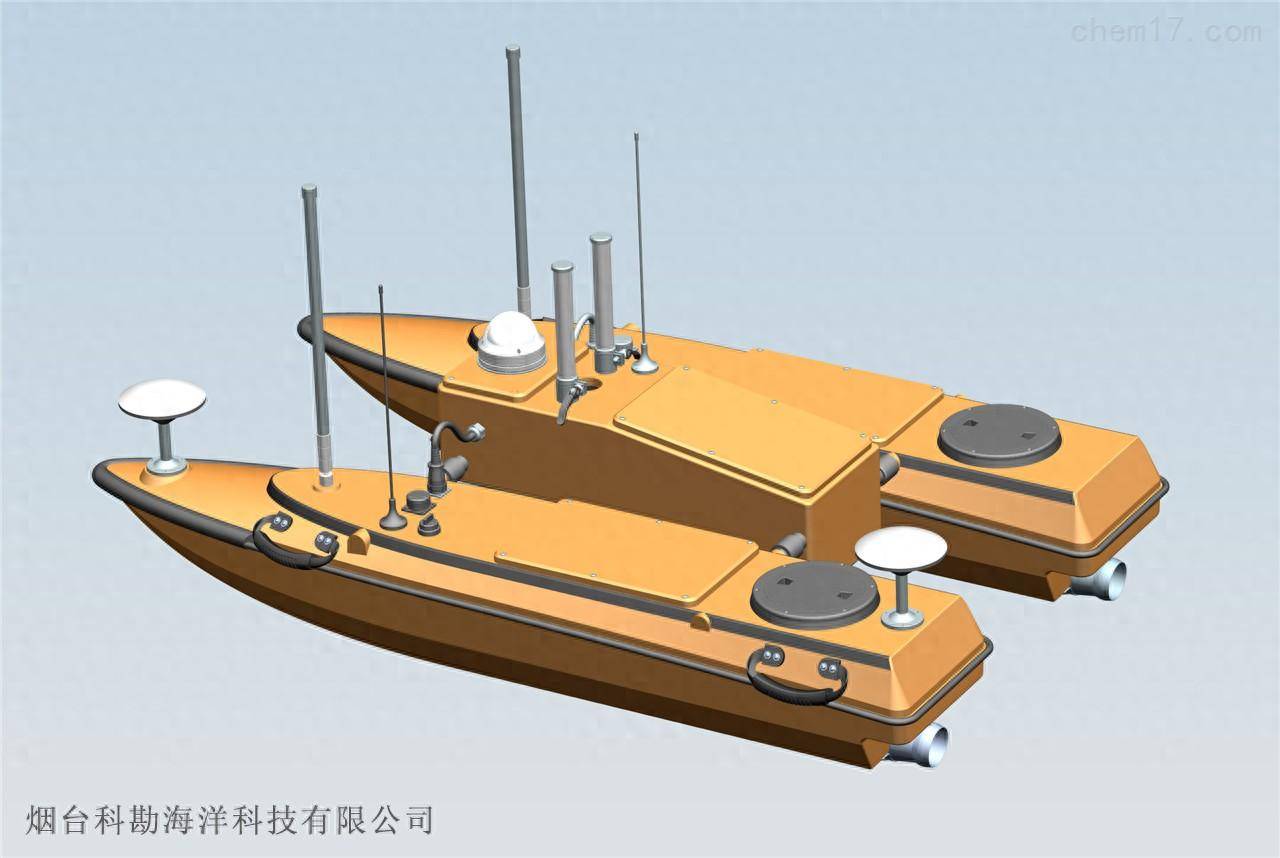
数据采集与监测:无人船可搭载全球导航卫星系统(GNSS)、多参数剖面测量系统(如 CTD)、气象观测系统、声学多普勒流速剖面仪(ADCP)和高光谱水质仪等设备,对海洋环境中的温度、盐度、海流、气象以及水质等参数进行实时采集与监测。比如在潍坊附近海域,可监测海水温度和盐度的分布,为海洋生态研究、渔业资源评估等提供基础数据;通过 ADCP 测量海流的速度和方向,帮助理解海洋动力过程。 9 d3 @6 F0 O% m& B* Q' S
长期连续观测:与传统的调查船相比,无人船具有无人值守的特点,可在特定海域进行长时间的连续观测。这对于研究海洋环境的长期变化趋势,如海洋气候的季节性和年际变化等非常有帮助,弥补了传统观测方式在时间连续性上的不足。
# w5 p1 P0 K2 \2 r6 v% w 2、海底地形地貌探测
% J" `8 t0 u' k* y) E: F3 F8 }$ u 水深地形测量:搭载单波束测深仪、多波束测深系统等设备,无人船可以精确测量海底的深度和地形起伏。在潍坊的近岸海域或特定的海洋区域,进行详细的水深地形测绘,为海洋工程建设(如港口建设、海底电缆铺设等)、海洋资源开发(如海底矿产勘探)以及海洋科学研究提供高精度的地形数据。
Q1 e9 b: y$ C- y 海底目标物检测:利用侧扫声呐、合成孔径声呐等声呐设备,无人船能够探测海底的礁石、沉船、管道等目标物。这对于保障海上航行安全、海底管道维护以及水下考古等工作具有重要意义。例如,在潍坊海域进行水下文化遗产调查时,无人船可利用声呐技术搜索可能存在的沉船遗址等目标。
# l- G5 b# J& N/ x& M 沉积环境调查:通过搭载浅地层剖面仪等设备,无人船可以探测海底沉积物的结构和分布,了解海底的沉积环境和地质特征。这有助于分析海洋地质演化过程、评估海底沉积物的稳定性,以及为海洋地质灾害的研究和防治提供依据。 ' _# C; x* p! ]& W; R$ k& n- r
8 W" W; v7 V1 Q# n# t5 i" ?
三、未来展望 0 ~! Z- V0 g& l8 o
技术创新:随着人工智能、自动驾驶、大数据等技术的不断发展和融合,无人船将具备更高的自主性和智能化水平。这将进一步提升无人船在海洋研究领域的应用效能和可靠性。
: `; m1 |; i6 x% w$ b 市场拓展:随着市场需求的不断增长和技术的不断进步,无人船在海洋研究领域的应用范围将进一步拓展。例如,在商业运输、海洋旅游等领域也将展现出巨大潜力。
. G- ^5 O; I8 F5 n7 R" U 竞争与合作:国内外企业纷纷加大对无人船技术的研发投入和市场拓展力度。潍坊市无人船产业将面临更加激烈的市场竞争。同时,合作与交流也将成为推动产业发展的重要动力。通过加强与国际先进企业的合作与交流,潍坊市无人船产业有望引进更多先进技术和管理经验,提升产业竞争力。
' D q2 Z9 u; m; e* h6 e4 B 四、总结 8 b, Q- l4 C+ K
潍坊市无人船在海洋研究领域的市场前景广阔。随着技术进步、政策支持以及市场需求的不断增加,无人船将在海洋科研、勘探、监测等领域发挥更加重要的作用。返回搜狐,查看更多
) l4 C7 Q7 L$ O. z2 a6 z( p5 K) p3 b3 O5 T6 i
责任编辑:
' x% ^6 H" P1 k5 @6 u# O4 k n% Y! h- h$ j8 x7 `7 w5 s0 E5 G5 f- |. {' o
1 L) P8 v5 p$ T, r9 x' V, X) X5 f
- n* g" n' Z3 y& t
( c) b: t$ Q7 [( a2 T4 b1 n/ {+ v4 T | 


