|
" f9 B( ]3 |4 @% v
随着我国海洋强国战略快速发展,海洋运载器在军用领域和民用领域均有广泛应用。由于水下的特殊环境,部分导航方式如卫星导航、无线电导航等无法在水下工作,而水下运载器又有长时间航行的自主导航需求。惯性导航系统虽然可以长时间工作,但存在误差积累,只使用惯导系统的精准性和可靠性不足。声学多普勒测速计程仪(DVL)是利用多普勒效应研制的一种为水面、水下载体提供速度信息并计量航程的自主导航设备,可用于水面舰艇、自主式水下航行器(AUV)、水下机器人(ROV)和拖曳平台、无人水面艇(USV)的导航系统,进行航位推算或辅助惯性导航系统(INS)来减少偏差。 ( e" D7 f' J1 ~( P% K7 t
近年来,众学者在DVL标定方法、提升和评估DVL测速精度、解决处理DVL短时失效问题、多传感器导航数据融合等方面进行了大量的研究工作。国内外诸多公司均有性能优良、成本价格低廉的DVL在产。美国的Teledyne RDI公司更是其中翘楚,其产品更新换代迅速,目前在售的具有不同用途和使用环境的4款产品,囊括了可安装于微型ROV的小尺寸Wayfinder型DVL、可在6km深海工作的Tasman型DVL、对底跟踪范围达到2200m的Pioneer型DVL和综合性能优良的Pathfinder型DVL。国内的相关科研单位及高校也参与到了多普勒测速设备的研制工作中,生产的DVL性能在测速精度、测深范围等方面接近世界领先水平。  , k% v% h/ \$ ~0 O1 d) q- _; d , k% v% h/ \$ ~0 O1 d) q- _; d
立春时节  1 E+ C# L9 j/ i 1 E+ C# L9 j/ i
⒈发展进程综述
3 @1 Z$ h6 Y9 ?- c; s 国外使用声学手段实现船舶速度的测量工作可以追溯于20世纪40年代,由哈佛大学声学研究实验室研制的基于多普勒背向散射船舶速度计,该产品被认为是最早发明的DVL。在此基础上迈阿密大学KOCZY和KRONENGOLD等人针对多普勒测流速开展了一系列研究工作,该设备后来由Airpax电子公司制造。 / x. }9 D7 G- T- d. Q
20世纪70年代初,WISEMAN等人开发了第1个测量三维速度的多普勒流量计,用于研究河口的湍流。具有里程碑意义的首台商业化多普勒测速设备是AMETEKStraza公司的ROWE和YOUNG在20世纪70年代末开发的一款300kHz的多普勒流速剖面仪(ADCP),型号为DCP4400。此外,该公司出售的基于JANUS配置的DVL,可针对当前流速进行调整,探测深度超过100m。AMETEKStraza公司与斯克里普斯海洋研究所的PINKEL和REGIER合作,评估了未来几年ADCP作为研制重点的可行性。 ( g* @0 o: k/ M
20世纪80年代初,多普勒计程仪形成产业化发展。1981年,ROWE和DEINES组建了RD仪器公司,主要是对声学多普勒计程仪以及多普勒流速剖面仪2种仪器的研发。RD仪器公司和AMETEKStraza公司研制了大量窄带ADCP产品,从远程75kHz设备到高分辨率1200kHz设备,在国际上占领了绝大部分市场份额。到80年代中后期,窄带多普勒测速技术已经被各国不同公司广泛应用,当时著名的有挪威Aanderaa公司、法国Thomson公司、日本Furuno公司等。但是,窄带ADCP明显的局限性在于分辨率、作用距离、测速精度之间的相互制约。降低工作频率可以减少海水介质吸收损失,提升作用距离。但是,在降低工作频率后,若要达到与高频信号相同的平均统计效果就需要增加脉宽,长脉冲会导致空间分辨率降低。 ( P r# r8 V/ W n: t
从20世纪90年代开始,科研人员将研制重心转移至宽带多普勒测速技术及设备性能提升上。BRUMLEY等人在1991年发明了宽带ADCP,该设备利用重复的双相编码和二进制相移键控(BPSK)调制方式形成发射波形,降低了自相关旁瓣,与窄带系统相比显著增加了时间–带宽积,在脉冲宽度一定的条件下,多个独立样本提升测速精度。宽带多普勒测速技术的研究工作解决了分辨率、作用距离、测速精度之间的相互制约的问题。由于DVL只计算船与海底回波中心区域的相对速度,因此DVL没有分辨率的概念,衡量其性能优劣的主要因素包括尺寸大小、功率、对底测速深度、测速精度。小尺寸的DVL和ADCP成为下一个研制热点。首个基于相控阵的ADCP于1995年完成研制工作并形成测试报告,其型号为VM0038HP,发射频率为38kHz,平面相控阵由988个单独的压电元件组成,半波长布阵成圆形配置。与相同频率的活塞式换能器相比,使用单个平面相控阵形成4个波束,替代了4个独立的倾斜活塞换能器,尺寸缩小到一半以下。这意味着,在固定尺寸的情况下,使用相控阵可以在更低的频率下工作,从而增加对底测速深度。此外,相控阵从根本上解决了声速补偿的问题,减小了测量误差。 + a0 {! J/ s/ I1 i* K
进入21世纪以来,多普勒计程仪步入向多功能多用途发展的新阶段。多普勒测速设备也被应用于诸多领域,如气候学、海洋学、水文学、水下航行器系统、环境资源勘探、石油钻井平台等。多普勒测速系统也从传统的船载式扩展为坐底式、手持式、悬浮式、拖曳式等。针对多普勒计程仪小型化、大深度、高精度的研制工作也一直在持续推进。截至目前,全球ADCP和DVL的主要供应商包括:TeledyneRDI、Nortek、Sontek、Rowetech和Waterlinked等。其中美国的TeledyneRDI公司研制的多普勒测速设备性能更优,占据市场的主导地位。
+ Q! o3 o( p9 _% ` ⒉TRDI公司最新研制成果
3 E/ T) C- E. \. y8 H+ W4 Y 美国的TeledyneRDI公司在全球范围内交付了4万余套多普勒相关设备,是行业领先的ADCP和DVL制造商,在民用领域和军用AUV领域占有率最高。针对宽带多普勒信号处理、相控阵设计、数据质量控制、系统自检等技术均为行业领先。其产品功能完善,技术革新迅速,目前在产4型号产品,其产品发展路线图如图1所示。
6 r3 S9 [3 `$ o) Y' U( c 
+ @ X% i0 {/ {6 G; N 图1 美国的Teledyne RDI公司产品发展路线图
" c$ d% l% K( n, {* l, D ⑴Pathfinder DVL 3 F" C% S+ N+ |1 `: i- I4 M; N9 I
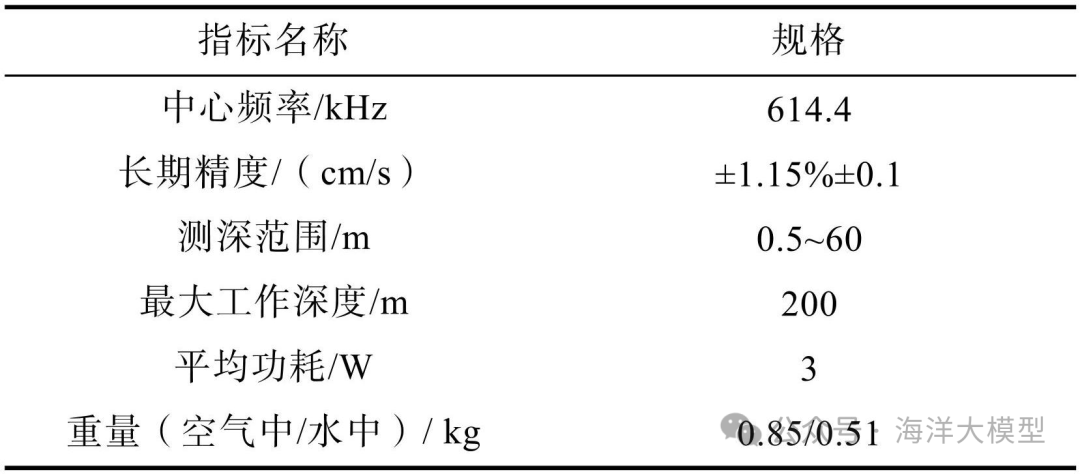
TeledyneRDI公司在2017年上市的Pathfinder多普勒计程仪,体积小性能优,适装于小型ROV及大直径AUV上。Pathfinder多普勒计程仪使用了宽带信号处理技术、相控阵技术、扩展范围跟踪技术等,可将底跟踪范围扩展60%以上,实现对底、对流跟踪自动切换。导航系统与惯性系统高精度耦合,进一步提高了DVL辅助的INS定位精度。该设备设置声学多普勒流速剖面仪选项,可根据需要进行功能扩展,并提供原始设备制造商(OEM)配置,根据占用空间和功能等特殊需求进行定制。典型的技术参数如表1所示。
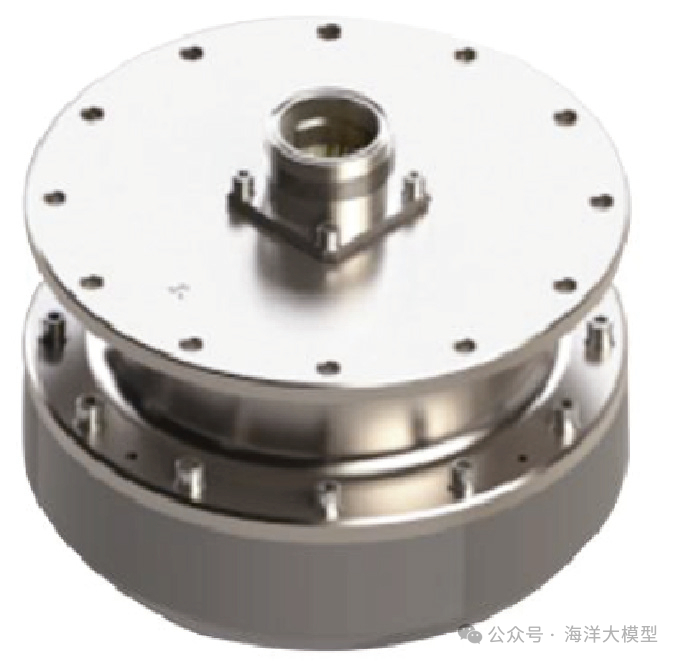
+ Z% E, `8 i8 Q: l) z: Q/ _& b. B 针对PathfinderDVL性能提升的研制工作也一直在进行,如图2是2022年5月发布的新研制的300kHz基于OEM配置的PathfinderDVL,其直径为14.4cm,高度3.38cm,质量2.9kg(空气中),配备了双轴数字倾角仪和加速度计。在有扩展范围跟踪(XRT)的条件下,底跟踪范围能达到500m。工作深度达到1000m。由于其外形尺寸更小,可作为当前OEMPioneer的替代产品使用。 7 S( Y- k3 y; t8 C B

2 {( j2 ^+ s( D7 |2 C4 _! y 图2 300kHz基于OEM配置的Pathfinder DVL
1 w3 U1 G9 T8 K 表1 Pathfinder DVL典型技术参数表
4 d6 x. y9 g+ y1 ?( T: O; [" | 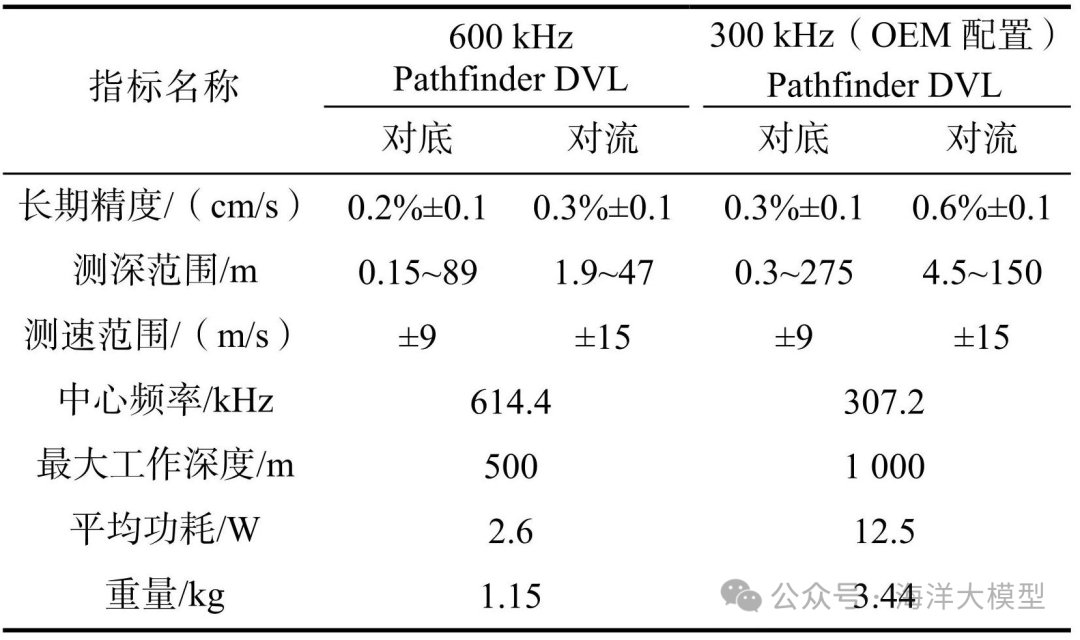
( S9 s0 u5 \5 p( V+ E. |
⑵Tasman DVL : _3 Q, T; N, N$ |" _
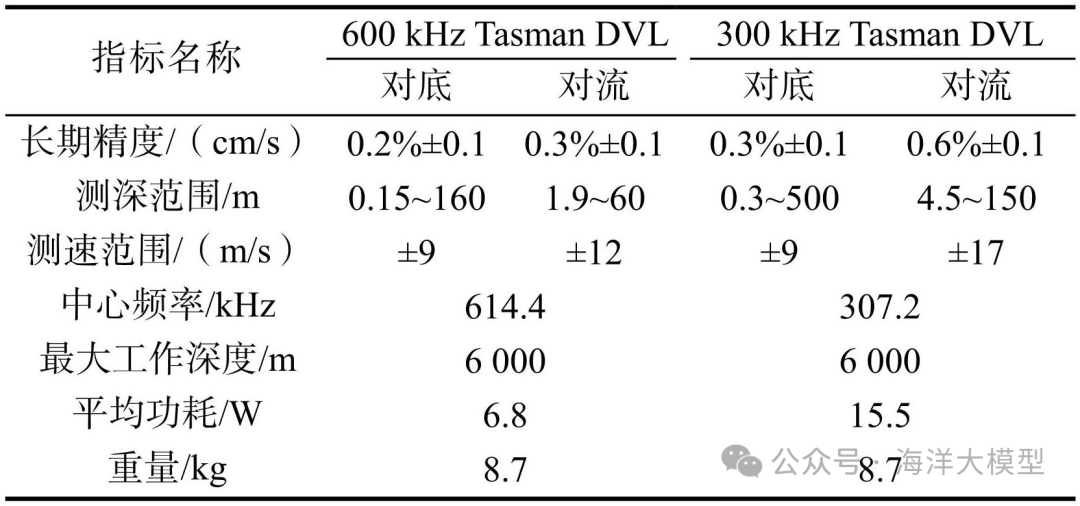
Tasman DVL是2019年研制生产的用于替代传统Workhorse DVL的高精度、低功耗、小型化产品,与其他型号产品相比,显著优势在于其在6000m水深条件下仍可正常工作。TasmanDVL采用相控阵设计,可在更小尺寸下提高位置精度,减小航行器阻力。为满足大深度工作需求,其上安装了换能器状态监视器、泄露传感器以便实时监测系统工作状态。此外,声学多普勒流速剖面仪、航姿参考系统(AHRS)等也可根据用户需求进行配置。创新的可即时更换换能器组件的设计方式,使得TasmanDVL在传感器发生故障时,可随时更换换能器,不需要再将DVL送回维修,换能器和电子舱相互独立,可即时更换换能器的Tasman DVL和典型的技术参数表如图3和表2所示。
$ E4 ^1 {+ ?" K) `- V0 P 
# g( p. C N) W% ]2 e% w" {% r 图3可即时更换换能器的新款Tasman DVL / |, E3 \" A' R0 w# f$ Y- T; u9 s
表2 Tasman DVL典型技术参数 m' K; `0 i p3 Z5 z
* K: d7 C* d0 G# o/ J ⑶Pioneer DVL + W; i7 n7 b0 f8 U4 f6 `
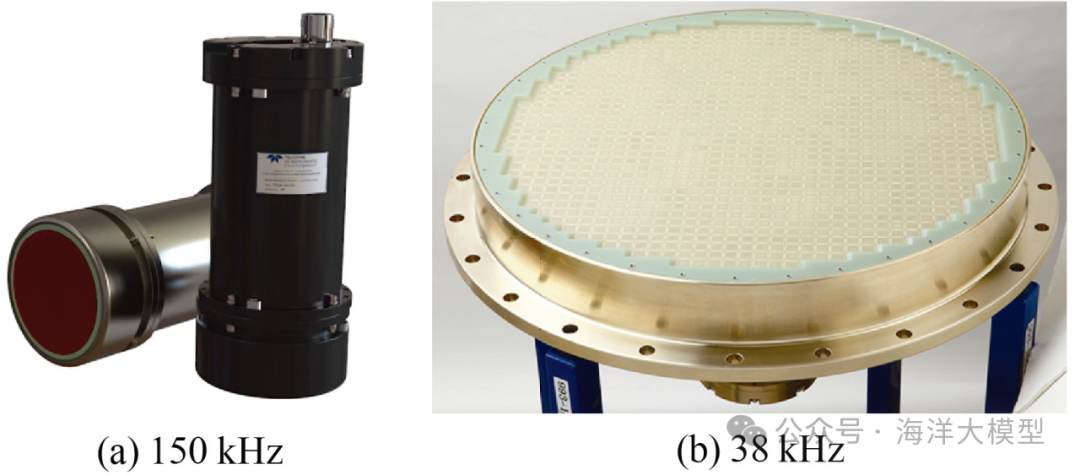
PioneerDVL是TRDI公司生产的远距离相控阵DVL,其作用距离最大可达到2500m。由于其探测深度相对其他DVL远,该设备用于辅助小型、中型和大型平台上的导航系统,使之有能力从公海深水区过渡到沿岸浅水区,38kHz的DVL适装于工作在全海深的水下无人航行器上。150kHz和38kHz这2种型号产品如图4所示,其典型技术参数如表3所示。 : w+ p4 y( Q- v; d, k3 L$ L
0 t9 g6 A3 e6 u9 B) R
图4 150kHz和38kHz的Pioneer DVL ' X! A' V$ s, X
表3 Pioneer DVL典型技术参数
4 g% I0 G& D/ J z4 q% @0 @9 x 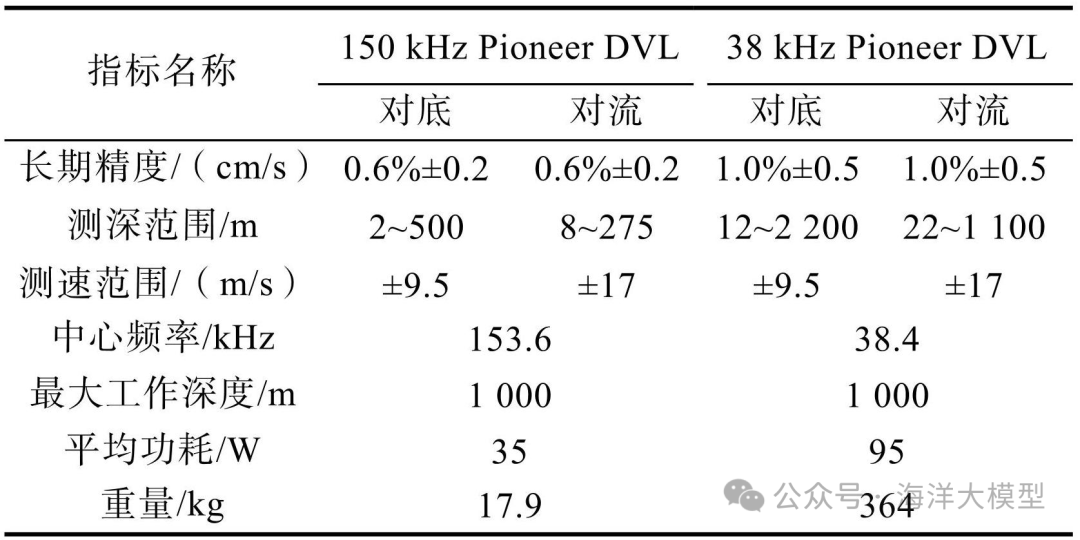
~7 D. D& U- A6 r3 d- l
⑷Wayfinder DVL % }/ f. G) P$ D9 \" U
WayfinderDVL用于实时输出三维速度信息和安装平台对底高速信息,其尺寸仅10cm×10cm×7cm,因此非常适装于微型ROV上。该设备可靠性高、易于集成、价格低廉,浑浊和深水中也能正常工作,适用于桥梁/大坝检查、渠道/渡槽检查、船体检查、生物学研究、打捞作业、潜水员导航等应用场景。WayfinderDVL结构及安装于微型ROV上的示意图如图5所示,其典型技术指标如表4所示。
1 W. ^: U9 b$ {( j( N( p 
0 m9 k# U0 Q0 q2 P
图5 Wayfinder DVL安装于微型ROV ; U; h% }% _' T
表4 Wayfinder DVL的典型技术指标 # i% _) Y+ r6 }$ `9 N/ r
* ]3 S% N4 j: I3 R 二、国内多普勒计程仪发展现状
5 E& M+ u' d2 q0 X 自20世纪70年代以来,我国的多普勒测速技术逐步发展,国内相关科研单位及高校均加入到了多普勒测速技术的研究中,包括杭州应用声学研究所、哈尔滨工程大学、中科院声学所、上海船舶运输科学研究所、中船航海科技有限责任公司及中船润声科技有限公司等等诸多家单位均针对多普勒测速技术进行研究,研制并生产了包括多普勒计程仪、多普勒流速剖面仪等设备。
8 z. c* ?7 R1 o9 s3 f7 C% {- _1 q% S @% t# D' l
杭州应用声学研究所旗下的杭州瑞利海洋装备有限公司产品包括SLC型走航式相控阵声学多普勒测流仪、SLS型自容式相控阵声学多普勒测流仪、STH-150型相控阵多普勒计程仪等。STH-150型DVL工作频率150kHz,测深范围5~350m,长期精度±1%±0.1cm/s,空气中重量小于20kg,尺寸Φ230mm×220mm(不含水密接插件高度)。 J" t0 f, x% s, S) R. J; x
. Y3 S8 a p3 j/ A0 a 图6 STH-150型相控阵多普勒计程仪 - y( Y* g: J b. ~. k" H8 X3 v
中科院声学所研制的SC系列多普勒流速剖面仪、水面艇用小型多普勒计程仪等设备在无人船测速导航、水文流量测量中发挥重要作用,还用于“蛟龙号”和“深海勇士号”载人潜水器以及DTA-6000声学深拖等水下作业平台。其最大探底高度200m,测速范围±10m/s,对底测速精度达到±0.4%×船速±5mm/s。 ! m( M/ e( g# r: K1 U. I
 fill=%23FFFFFF%3E%3Crect x=249 y=126 width=1 height=1%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E)
5 ]( v. G/ Q- |) a1 o! W6 d7 Y3 p0 _ 图7 水面艇用小型多普勒计程仪
' J+ u! R! D; p* h: L; H" N 此外,哈尔滨工程大学研制生产了HEU-150型、HEU-300型DVL,中科院东海站研制的4000m大深度DVL等等。
7 U# r* C# g8 f( v4 R+ ~ 尽管在国外长期的技术封锁下,国外高精度、小型化的DVL出口受管制,国产DVL与世界先进DVL设备性能差距仍在逐步缩小。中船润声科技有限公司研制生产了不同功能的系列化DVL产品,包括了Dolphin-D500型、Dolphin-D300型、Dolphin-D300A型、Dolphin-D100型等,小型化、大深度、高精度的DVL设备性能正在逐步接近世界水平。Dolphin-D100B型DVL和Dolphin-D300A型DVL如图8和图9所示,其性能参数如表5所示。
$ K/ P& j0 j6 L9 e
- H/ b( H* N- @* c5 m: @
图8 Dolphin-D100B型DVL实物图
3 ]6 L- r$ J }! C* x1 _$ q
* ~+ p# I2 w2 ]" x# V 图9 Dolphin-D300A型DVL 5 L8 Z) _% F/ g5 o2 q" j( H, M n
表5 Dolphin-D100B型与Dolphin-D500型DVL性能 , r0 t# ]' b5 L/ J1 r1 G* G
8 n6 e$ O" j, b s, K+ d3 k: P
三、关键技术难点 : h, Z, X. S" U, q
⒈大深度多普勒计程仪体积受限的问题 ) Z1 b$ w+ a7 w
随着近年来人类对深海资源的开发和利用,深海事业在国际经济和国防战略中占据重要的地位,各国纷纷投入巨资开展了如海底地形勘探、科学考察、深海作战等相关领域的科学研究、技术开发和装备发展工作,为水下导航技术的发展带来了新的挑战。深海无人装备的紧凑化结构和能源限制,对搭载DVL的体积和重量都提出更高的要求。此外,为配合便携性、轻型UUV的发展需求,结合以观测功能、娱乐活动为主的微型ROV的巨大应用前景,小型化、大深度、高精度的多普勒计程仪的研制工作成为研究热点。为增加DVL的打底深度,首先考虑到的是增加发射声基阵的驱动功率,但是过大的发射功率会导致空化现象,导致波束图退化,声阻抗降低引起声基阵和发射机不匹配,非线性效应引起的发射脉冲失真,为避免空化现象需要限制发射功率。另一个思路是降低工作频带范围,减小传播损失,提升作用距离。但与此同时低频换能器体积和重量增加,和小型化的要求相矛盾。
: v6 D* r" q: r& e/ ?7 R 针对大深度的小型化DVL的研制工作成为研究热点。使用相控阵用单个平面阵替换原有的4个独立活塞式换能器可以有效缩小尺寸。有文献提出了一种八波束相控阵DVL,采用双JANUS配置方式,有效减少布阵间距并减小相控阵体积。相关测速声呐的测速精度低于多普勒测速仪,但是它不要求窄波束发射,也不要求指向斜下方的波束,因此可减小声基阵体积和降低工作频率。2015年BRUMLEY和TAUDIEN发明了小孔径声速传感器(SAAVS),该装置采用传统相控阵DVL和声相关计程仪(CVL)相结合的方式,由多个子阵列组成,每个子阵列形成4波束。该方法在相对较宽的波束下也能获得良好的性能,通过空时相关信号处理算法解决波束发散和地形偏差等传统问题,该装置可在保证测速精度的条件下减小换能器体积。
9 q- _3 ~# t2 G1 K* D% N9 G3 ~ 目前国内的DVL大多选择相控阵的方式,尺寸已经大大缩小,但是大深度DVL的尺寸和功耗由于电子元器件等因素和国外的仍有差距,电子元器件的集成化程度对比国外还是有很大提升空间,未来DVL研制重点仍在小型化上。
8 z) T+ Y& e! }7 f- G9 |" O ⒉水面航船空化造成能量衰减导致作用距离降低问题
' v6 W, [. U# P3 }% S5 w 由于海洋环境条件复杂,在风浪和潮涌的共同作用下,舰载平台容易产生挠曲变形,影响姿态角估计。此外舰船自身惯性大,受水阻力影响,造成姿态误差平滑精度不高,为对准精度的估计造成影响,只使用惯导系统进行方位导航存在误差积累、系统可靠性差的问题。全球导航定位系统(GNSS)具有明显的多径效应、在电磁环境复杂、电离层活动不规律的情况下,GNSS信号捕捉跟踪困难。此外在高纬度地区可用卫星数目有限,无法为主惯导提供实时、准确的输出速度校正信息。为解决上述问题,需采用多传感器多源信息融合的方式以实现准确的航位推算。
, d' [& Y/ ~( J( r5 K% _. w 但是针对水面舰使用DVL进行辅助导航,在航速较高的情况下,艇底板不平整处会存在空化现象,螺旋桨高速转动产生大量空化噪声。当DVL湿端换能器基阵附近存在大量气泡时,会导致相控阵发射和接收声波能量衰减,影响DVL工作深度,工程上使DVL湿端远离螺旋桨安装可以减少空化影响。针对这一问题的分析工作还比较欠缺,也尚未形成量化的精度分析结果。 * V6 k$ P- F" U4 X: _0 \
⒊航船姿态摇摆和安装误差问题 3 |; J% ^! l' F% ? _, {
针对船有运动的情况的误差分析,国内外学者做了大量的研究工作,大多集中于减小摇摆或者测量摇摆角并进行修正上。采用将换能器安装于稳定平台上,以稳定换能器指向的方式,但是该方法造价昂贵,成本高,并且针对水面航船在海况恶劣的情况下,稳定平台也很难发挥效用。另外采用JANUS配置方式,使用前后2波束可以适当抵消由于俯角变化的测速误差。使用捷联惯性导航系统(SINS)测量姿态角并进行修正,SINS/DVL理论上需要固联在运载体的质心位置以避免“杆臂效应”,如果安装位置不在质心上,或者摆动不是参照质心摆动的,波束抵消效果受影响,对导航精度的影响较大。
) Z' z& Z/ R, p m 实际安装过程中存在安装偏差,不可避免且难以借用其他工具直接测量,且匀速直航的航行方式,增加了测速误差参数的标定难度。将SINS/DVL进行一体化设计,使用SINS测得的姿态角对DVL测量值进行修正,可以降低由于航船姿态摇摆造成的测速误差。 P6 g6 Q0 n) _' I" n+ A
⒋非典型海底地形等因素导致解算错误问题 ' w Y& \) D! n/ l. P) U
DVL主要通过测试在平台和海底被照射区域存在相对运动条件下,反射信号的多普勒频移,来进行航速的解算,反射信号与海底的地形特征有很大关系。在底跟踪工作模式下,遇到不平整海底地形如海底沟、海底山脉或者遇到海洋生物阻挡、海底强吸声地质、载体航行姿态剧烈变化等情况,导致反射回波异常,出现测量数据短暂失效的情况,直接影响其航位推算性能。
$ a& j* h: |+ B+ B 目前可以从硬件结构和软件算法2层面解决DVL数据失效的问题。在硬件方面,可以设计多组辅助声学定位系统如超短基线(USBL),或者考虑组合导航如使用惯性导航、地球物理导航(地形、重力场、磁场等)和DVL组合使用等方式。如有文献在DVL底跟踪模式失效时,使用流跟踪方式作为DVL速度量测,为INS提供速度辅助。在软件方面,有2种解决失效问题的思路: 9 q* p; e! p& i5 }9 k
⑴可以采用动力学模型、深度学习等方式以速度估计值替换掉DVL的失效测速信息。动力学模型包括航行器动力学和流体动力学2种,利用推进器推力、航向角、对流速度等信息最终推演估计得到对地速度。深度学习利用卷积神经网络(CNN)、循环神经网络(RNN)及长短记忆网络(LSTM)等方式,利用DVL正常时的输出速度对DVL失效时的速度进行预测,以保证DVL在短时失效时的导航精度。有文献采用偏最小二乘回归(PLSR)和支持向量回归(SVR)相结合的方法构建混合预测变量,基于SINS当前和过去的计算速度作为预测因子输入,在出现DVL数据失效时,PLSR-SVR预测器提供DVL测量值的估计进行信息融合。 % u' |8 L+ d) ]$ k4 I+ |4 `! S
⑵针对DVL获取的航位推算数据进行预处理如剔除野值、数据融合等手段,通过使用扩展卡尔曼滤波(EKF)、无迹卡尔曼滤波(UKF)、容积卡尔曼滤波(CKF)、自适应卡尔曼滤波(AKF)等滤波算法,将DVL短时异常的输出结果剔除,使得航位推算结果更稳定。 7 Y* p8 K7 R# W. D" r; _
上述提到的方法从原理上给出了解决DVL短时失效的问题,但仍处于理论研究和验证阶段。在实际工程应用中需要在系统计算量和导航精度之间进行权衡,选择稳定性高的处理方式,避免截断误差或者发散的情况发生,也需要结合平台实际的运动状态对信号处理方式进行选择。 ( W! j: w9 r9 F6 _
四、结束语 , K' U# Y: m( V" y; T8 q) f
通过对国内外DVL发展现状进行分析,结合美国的TRDI公司目前在售的根据使用环境和用途进行划分的4款不同的系列化产品,能够得出结论:目前国内外的DVL还有一定差距,主要集中在电子部件集成化程度低、没有形成系列化产品上。但是在国家的大力支持下,我国逐步实现高性能宽带多普勒设备的研制,技术水平趋于成熟。 / F) k% j) ?( |" K; L
研制出有竞争力的大深度、低功耗、高精度、可靠性强、外观和软件界面为用户认可的多普勒计程仪是当前设备发展趋势。进行系列化产品的研制工作,使之能适用于不同的使用环境,可根据用户需求和用途进行定制,是未来产品研发的关键手段。提升标定方法准确度、设备鲁棒性、解决短时失效的问题、在紧凑空间限制下扩大DVL底跟踪范围等热点问题的研究,能够有效提升水下航行器的导航定位精度和可靠性。
& K+ ], q5 @. w+ g 来源:《数字海洋与水下攻防》 % B" `) M0 w- W( P
本文系海洋大模型微信订阅号编辑转载,转载目的在于传递更多信息,并不构成任何投资及应用建议。投资者据此操作,风险自担。我们尊重原创者,版权归原作者和媒体所有,在此向原创者表示感谢。如涉及作品内容、版权和其它问题,请在30日内与平台联系,我们将在第一时间删除内容!本文章版权归原本作者,海洋大模型微信订阅号拥有对此声明的最终解释权。
M! i# v' d5 V0 `7 g: F. b' s: O' t& J2 S+ ?* ^6 y! Q
# \7 A1 B- ~; Q3 l8 ?! J0 U: c. v' u* p
( m' p, g7 ]5 @! P
) T) m# K' P; Z* Z! M$ q% E% u | 

